Projects
This page shows our upcoming, current, and past sponsored research projects.
We not only conduct cutting-edge research, but also try to work closely with industry. We have established good collaborations with many top companies, and we believe that the economic benefit is a core criterion to evaluate the research; good research should propel the advancement of our society.
Current
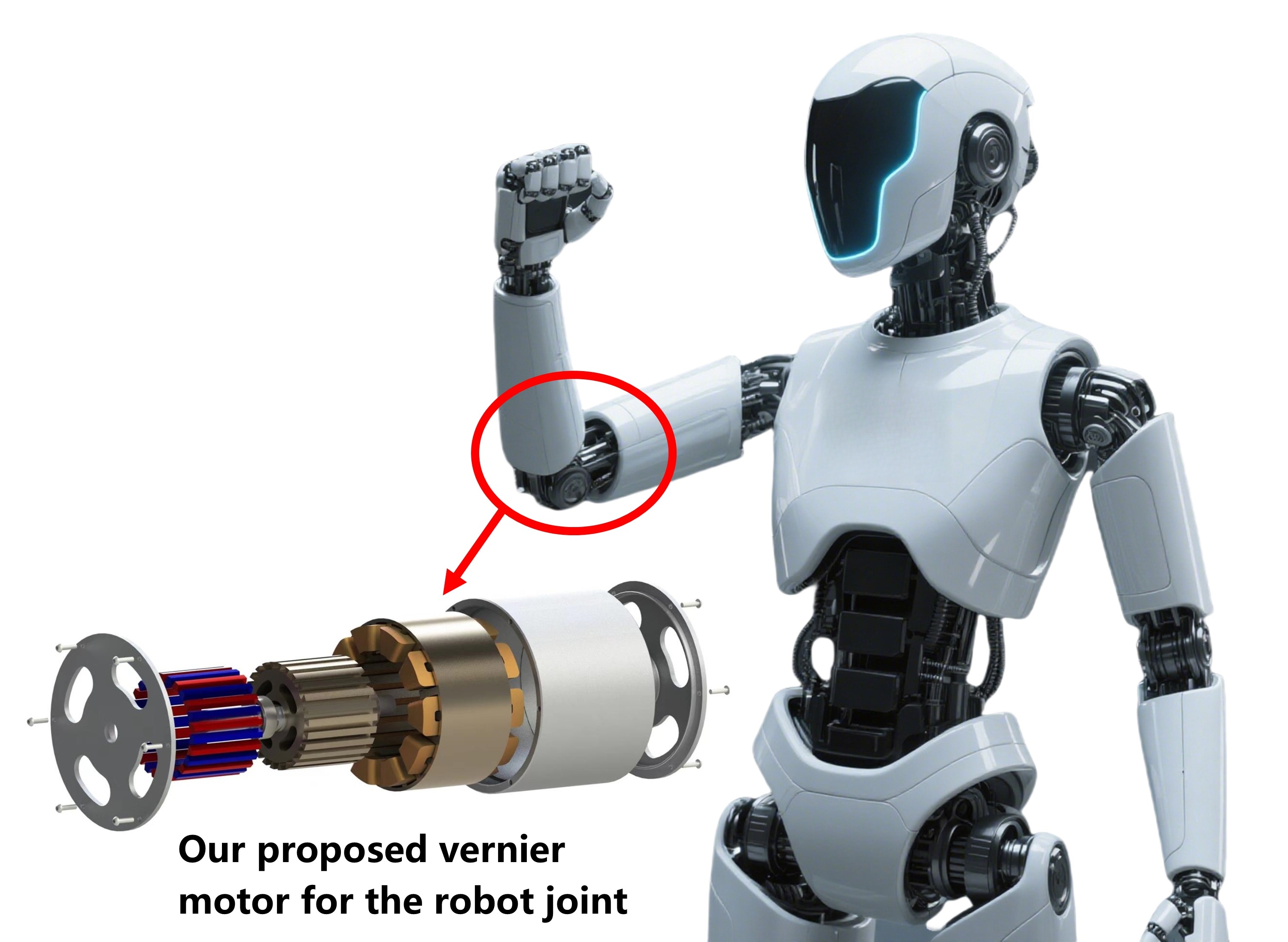
Utilizing multi-physics analysis and surrogate-model optimization method to design high-performance vernier motors for humanoid robot actuators.
Replacing silicon-based motor driver with GaN device and implementing neural-network-based algorithm for humanoid robot actuators to improve efficiency and robustness.
Constructing an automation system by utilizing data and expert knowledge-driven artificial intelligence algorithms to conduct closed-loop material design, process optimization, mechanism elucidation, and application research for perovskite solar cells.
Using machine learning algorithms to analyze and optimize the motor-inverter unit of pumped storage system, and providing data for the corresponding device-level twin simulation platform for maintenance purpose.
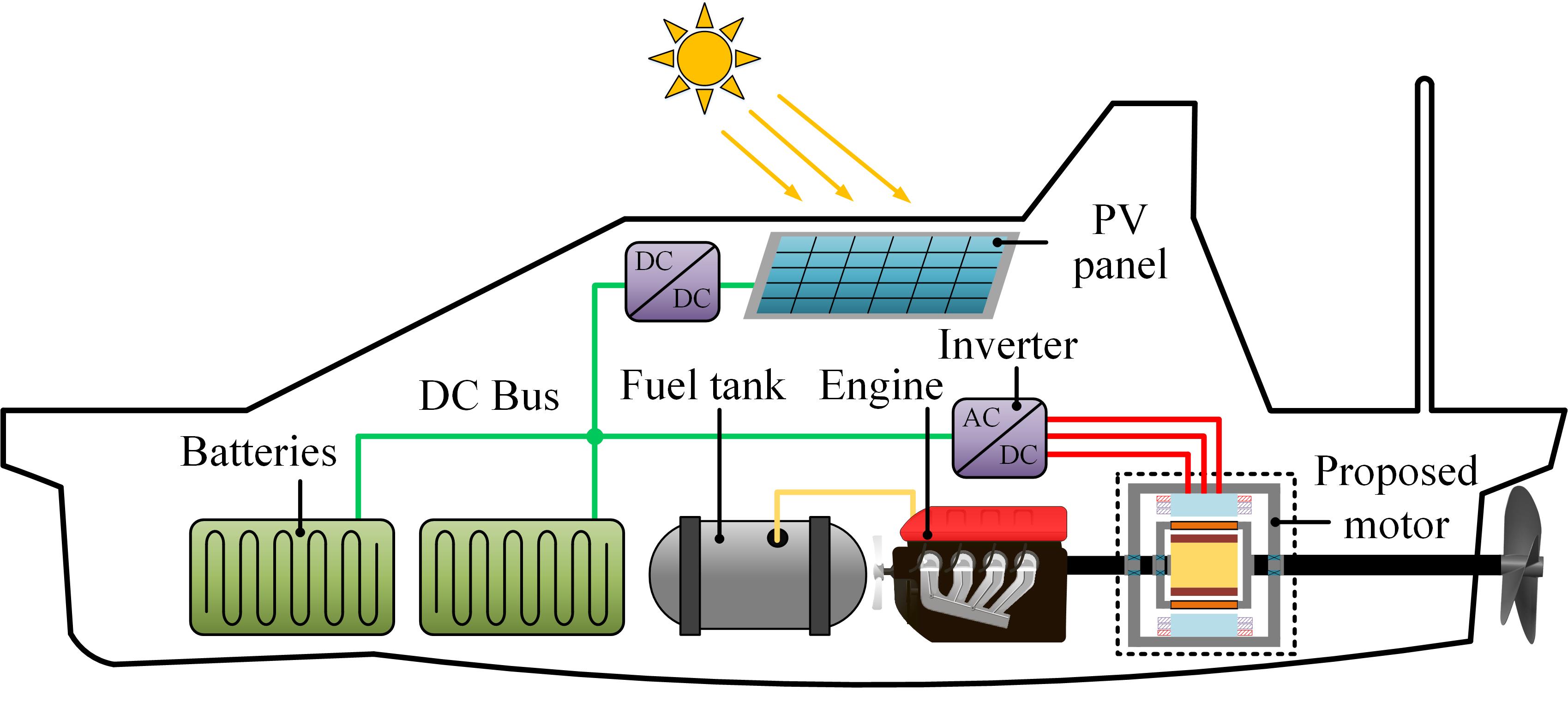
Designing and optimizing a novel flux-enhancing dual-mechanical-port electric machine for the hybrid propulsion system of far-sea hybrid unmanned surface vehicles to increase its range, dynamic performance, and reliability.
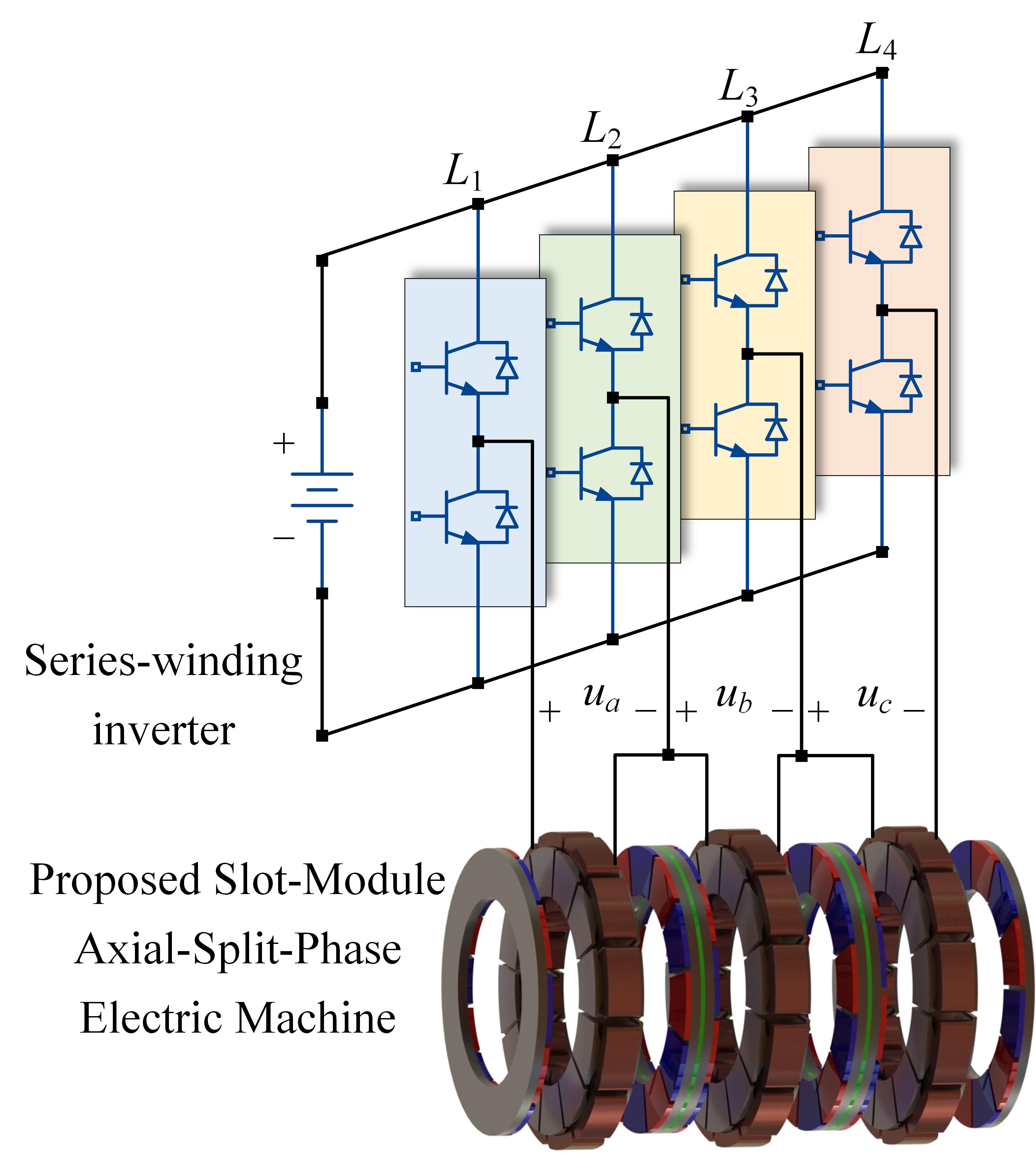
Proposing a novel slot-module axial-split-phase electric machine with a series-winding inverter with high power density, strong fault tolerance. The studied multi-physics analysis framework can be transferred to other applications.
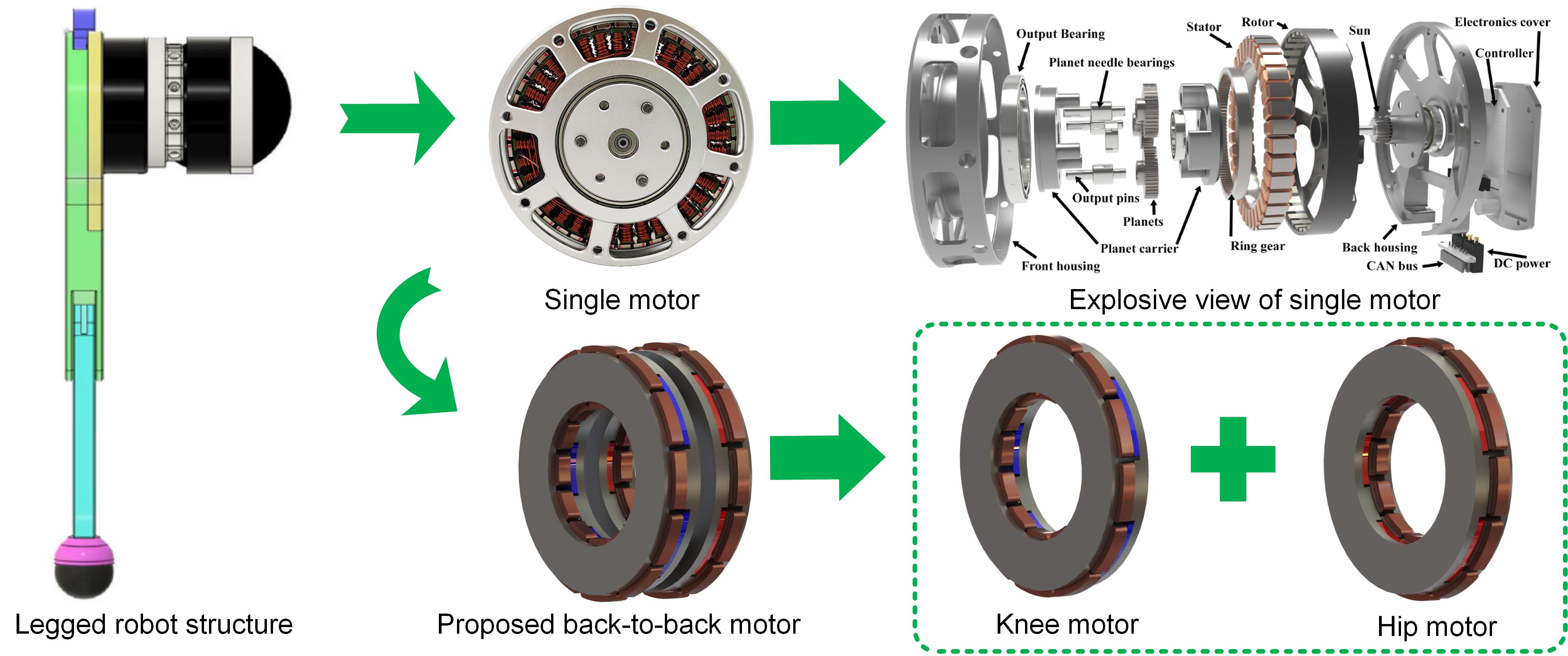
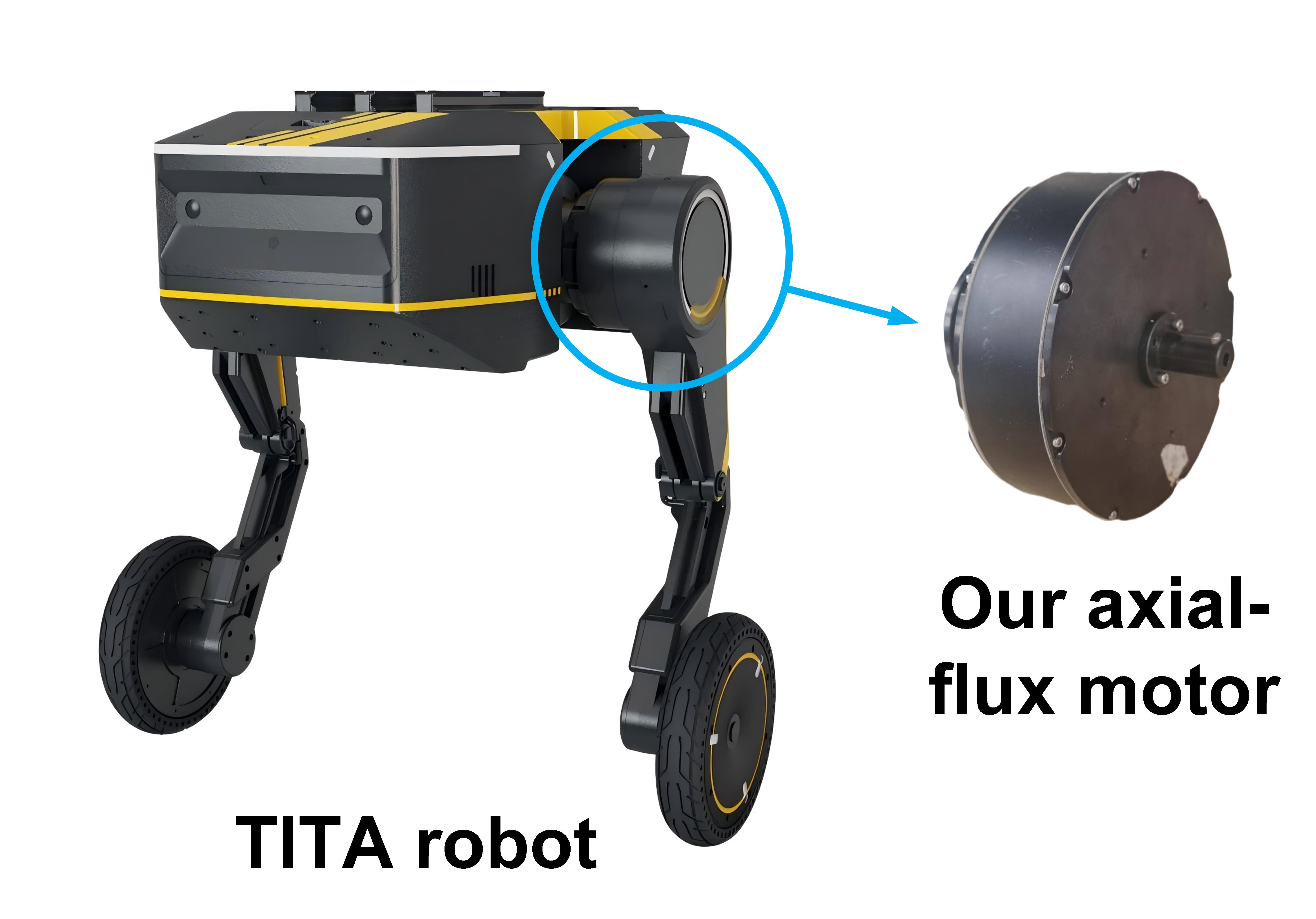
Investigating a new topology scheme for back-to-back alternating pole axial permanent magnet synchronous motors for legged robot drives, providing a more compact, higher torque density solution.
Developing a novel reluctance resolve system based on the complex plane excitation mechanism, which can fudamentally eliminating the limitation on high-speed accuracy imposed by a single sinusoidal excitation signal in conventional rotary transformer demodulation systems.

Inspired by the significant speed-drop curves observed in eVTOLs’ and UAVs’ propulsion motors under strong wind disturbances, integrating machine learning into motor control and proposing an “anti-disturbance zero-speed-drop intelligent control algorithm”.
Past

Designing an advanced gravity storage system and the corresponding control strategy to utilize gravity of weights to store energy, and cooperating with the power grid to realize peak shaving effect.

Establishing an integrated land-sea energy system framework by combining electric storage ships with a power-to-hydrogen system, so the geographical advantages of offshore wind power can be fully leveraged.

Developing a neural network speed stability compensation control method inspired by the motor overshoot problem to reduce speed overshoot issue during the dynamic response process of servo motors.
Developing a dual-stator vernier motor with the Halbach array arrangement of permanent magnets to significantly enhance torque density, and the proposed motor is suitable for heavy-duty industrial robot application.
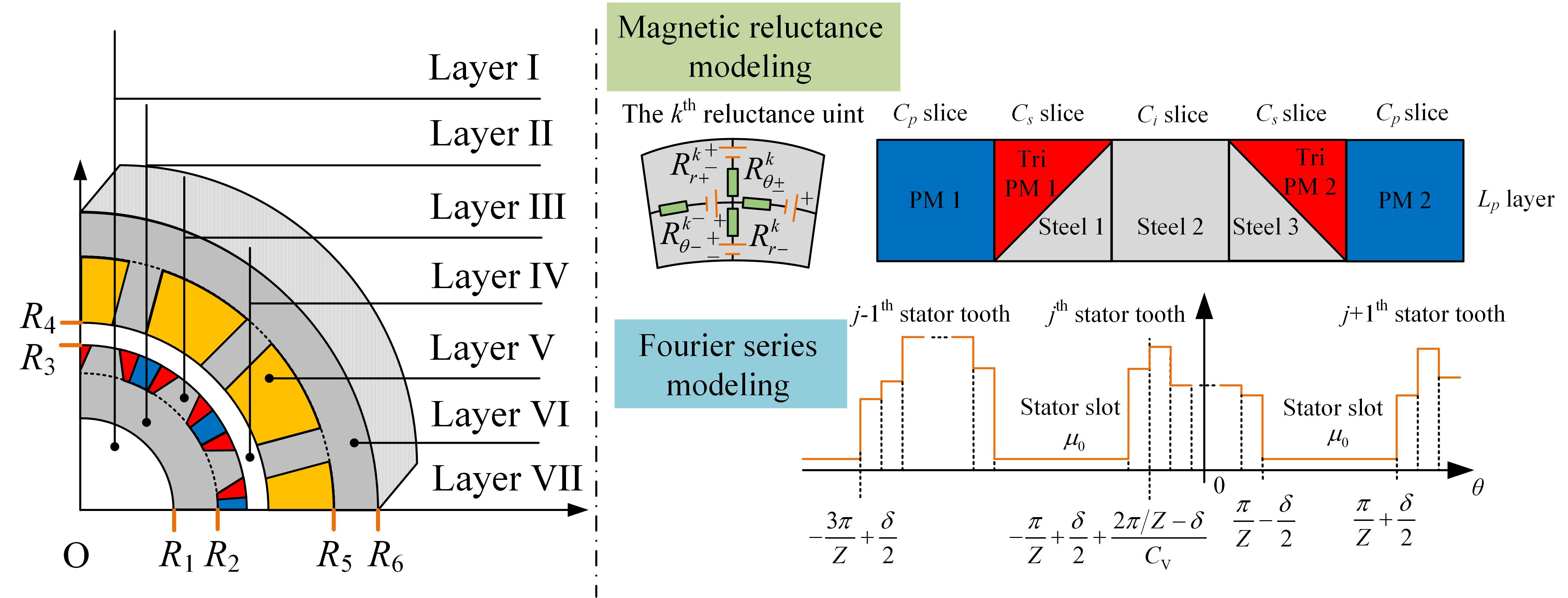
Developing a high-precision composite analytical method that combines the Fourier series method and magnetic network method for solving electromagnetic parameters of the proposed consequent-pole permanent magnet vernier motors.
Designing and manufacturing a low-speed high-torque direct-drive PMSM for wheeled robot application, the efficiency can be improved, noise reduced, and service life prolonged thanks to the elimination of reduction gearboxes.